





I. Introduction▲
Qu'est-ce que la cinématique ? Tout d'abord, elle fait partie de la mécanique, la partie de la physique s'occupant de décrire les mouvements, les changements d'état du système (de repos à accélération, par exemple) et les états d'équilibre des systèmes physiques. La cinématique ne regroupe qu'une petite partie de la mécanique : tous les mouvements, sans se soucier de leur origine, de leur cause (elles sont décrites par la dynamique).
La cinématique décrit trois types de mouvements : les translations (une voiture roulant sur la route, un mobile en chute libre), les rotations (la terre autour du soleil, un seau attaché à une corde) et les vibrations (le pendule de Foucault).
Cet article suppose que vous connaissiez déjà les principes du calcul vectoriel (addition et soustraction de vecteurs, norme). Des explications plus avancées requièrent des connaissances plus approfondies en analyse mathématique (dérivée et primitive).
Le système d'unités MKSA correspond au système le plus largement utilisé dans le monde. Son nom provient des quatre unités principales qu'il définit : le mètre (unité de distance), le kilogramme (unité de masse), la seconde (unité de temps) et l'ampère (unité de courant électrique). Ce système sera utilisé tout au long de cet article.
I-A. Quelques définitions▲
Avant d'aller plus loin, commençons par quelques définitions.
Une particule est un point de l'espace doté d'une masse. Si cette particule est en mouvement, elle est appelée mobile. On considère que toute la masse d'un corps solide se concentre en un seul point, le point matériel. Dans toute la théorie de la cinématique, tout objet considéré ne sera qu'un point, peu importe sa masse ou son volume.
II. Les bases de la cinématique▲
II-A. Les notions de position et de déplacement▲
Pour définir une position, un axe doté d'une origine et d'un sens sont requis. La position se définit depuis cette origine. Le déplacement kitxmlcodeinlinelatexdvp\overrightarrow{\Delta x}finkitxmlcodeinlinelatexdvp est la variation de position.
Dans le schéma ci-dessous, nous savons donc que la position est un point de cet axe. Le vecteur déplacement, qui indique la distance parcourue, son sens (pas de direction, l'espace choisi ne possède qu'une dimension) et son origine. Ces formules sont fonctionnelles dans un espace à n dimensions (trois suffiront généralement) :
kitxmlcodelatexdvp\mathbf{d} = \overrightarrow{OP_2} - \overrightarrow{OP_1}finkitxmlcodelatexdvp kitxmlcodelatexdvp\Delta x = \left\| \overrightarrow{OP_2} - \overrightarrow{OP_1} \right\|finkitxmlcodelatexdvp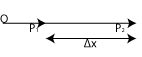
Dans le système MKSA, le déplacement s'exprime en mètres.
II-B. La notion de vitesse▲
La vitesse est, assez intuitivement, la variation de position au cours du temps. Cette définition donne très directement son unité : le mètre par seconde (kitxmlcodeinlinelatexdvp{}^{m}/_{s}finkitxmlcodeinlinelatexdvp ou kitxmlcodeinlinelatexdvpm \times s^{-1}finkitxmlcodeinlinelatexdvp). D'une manière plus explicite, la vitesse définit la distance parcourue chaque seconde.
La vitesse moyenne est la distance qui est parcourue sur un laps de temps long (par exemple, la vitesse moyenne d'un trajet se calcule par rapport à la durée totale du trajet).
kitxmlcodelatexdvp< v > = \frac{\Delta x}{\Delta t}finkitxmlcodelatexdvpLa vitesse instantanée, a contrario, se calcule pour un laps de temps extrêmement court. Idéalement, elle devrait se calculer pour un temps nul. Cela n'est malheureusement pas possible. Pour la définir d'une manière très mathématique, il est possible d'écrire :
kitxmlcodelatexdvpv = \lim_{\Delta t \to 0} \frac{\Delta x}{\Delta t}finkitxmlcodelatexdvpLe concept mathématique qui permet de la calculer très aisément est la dérivée. On dit que la vitesse est la dérivée de la position par rapport au temps, ce qui s'écrit :
kitxmlcodelatexdvpv = \frac{dx}{dt}finkitxmlcodelatexdvpPlus en pratique, si vous connaissez l'expression analytique de la fonction exprimant la distance parcourue en fonction du temps, kitxmlcodeinlinelatexdvpx(t)finkitxmlcodeinlinelatexdvp, vous pouvez trouver l'expression analytique de la vitesse instantanée au moment kitxmlcodeinlinelatexdvptfinkitxmlcodeinlinelatexdvp :
kitxmlcodelatexdvpv(t) = x'(t)finkitxmlcodelatexdvpCette vitesse peut être négative, rien ne l'interdit. Cela signifie juste que le mobile concerné recule dans le système d'axes choisi.
La vitesse est un vecteur qui s'applique au mobile.
II-C. La notion d'accélération▲
D'une manière tout aussi intuitive, l'accélération est la variation de vitesse en fonction du temps. De la même manière que pour la vitesse, on définit l'accélération moyenne et l'accélération instantanée. Son unité est, par conséquent, kitxmlcodeinlinelatexdvp\frac{m}{s^2}finkitxmlcodeinlinelatexdvp ou kitxmlcodeinlinelatexdvpm \times s^2finkitxmlcodeinlinelatexdvp.
De même, l'accélération peut être négative : le mobile considéré voit sa vitesse diminuer en fonction du temps, la vitesse à un instant kitxmlcodeinlinelatexdvpt_0finkitxmlcodeinlinelatexdvp est supérieure à la vitesse à l'instant kitxmlcodeinlinelatexdvpt_1finkitxmlcodeinlinelatexdvp qui le suit. La différence kitxmlcodeinlinelatexdvp\Delta v = t_1 - t_2finkitxmlcodeinlinelatexdvp est donc négative.
D'une manière très mathématique, on peut écrire :
kitxmlcodelatexdvp< a > = \frac{\Delta v}{\Delta t}finkitxmlcodelatexdvp kitxmlcodelatexdvpa = \lim_{\Delta t \to 0} \frac{\Delta v}{\Delta t} = \frac{dv}{dt} = \frac{d^2 x}{dt^2}finkitxmlcodelatexdvpLa vitesse est un vecteur qui s'applique au mobile.
II-D. Liens entre position, vitesse et accélération▲
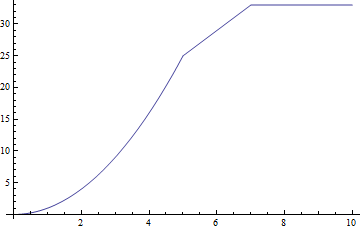
Le mobile commence par avancer d'une distance de plus en plus grande sur un intervalle de temps de même longueur ; cette distance finit par devenir égale à elle-même sur la période suivante ; finalement, il n'avance plus. Comment cela peut-il se voir avec les dérivées ?
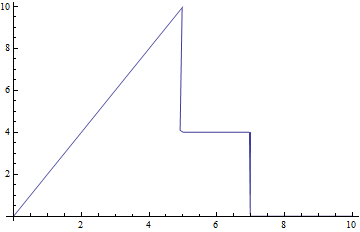
Dans un premier temps, la vitesse croît : le mobile parcourt une distance plus grande pour une même période de temps. Ensuite, elle stagne : le mobile ne gagne plus de vitesse, il parcourt toujours sur un même intervalle de temps une même distance. Finalement, la vitesse est nulle, l'objet ne parcourt plus la moindre distance, quelle que soit la période de temps laissée. Remarquez que la vitesse s'arrête brutalement, sans décroître, l'objet n'a apparemment pas décéléré avant l'arrêt (il a peut-être heurté un mur).
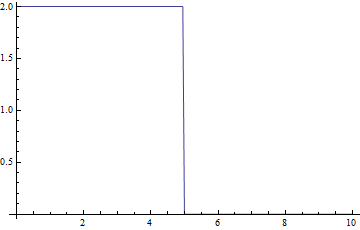
Tant que la vitesse croît, l'accélération est non nulle ; dès que la vitesse devient stagnante, l'accélération devient nulle. Finalement, l'intuition se révèle vraie : l'objet n'a pas décéléré, il s'est arrêté brutalement.
Ces graphiques ont été réalisés à l'aide de Wolfram Mathematica. Pour ceux qui seraient intéressés, voici les commandes permettant d'obtenir les fonctions donnant ces trois graphiques :
Piecewise[{{x^2, x < 5}, {4 x + 5, x < 7 }, {33, x < 10}}]]
D[Piecewise[{{x^2, x < 5}, {4 x + 5, x < 7 }, {33, x < 10}}], x]
D[D[Piecewise[{{x^2, x < 5}, {4 x + 5, x < 7 }, {33, x < 10}}], x], x]
Plot[Piecewise[{{x^2, x < 5}, {4 x + 5, x < 7 }, {33, x < 10}}], {x, 0, 10}]
Plot[Piecewise[{{2 x, x < 5}, {4, x < 7 }, {0, x < 10}}], {x, 0, 10}]
Plot[Piecewise[{{2, x < 5}, {0, x < 10 }}], {x, 0, 10}]Dans la suite de l'article, ces graphiques seront agrémentés d'un petit bout de code permettant de les refaire avec Mathematica.
III. Mouvements de base▲
III-A. Mouvement rectiligne uniforme (MRU)▲
Un mobile soumis à un mouvement rectiligne uniforme se déplace à vitesse constante. Sa vitesse ne varie pas ; la distance parcourue augmente donc de manière linéaire (à chaque seconde, il parcourt la même distance ; quel que soit l'intervalle d'une seconde que l'on choisit, le mobile aura parcouru la même distance).
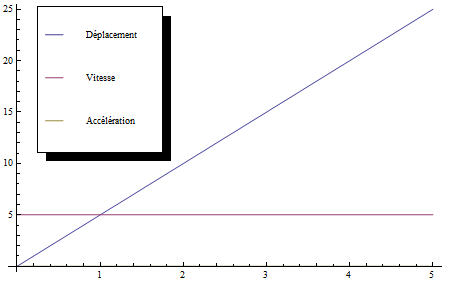
<< PlotLegends`
Plot[{5 x, 5, 0}, {x, 0, 5}, PlotLegend -> {"Déplacement", "Vitesse", "Accélération"}]En équations, cela donne :
kitxmlcodelatexdvpx(t) = x_0 + v \times tfinkitxmlcodelatexdvp kitxmlcodelatexdvpv\ \mathrm{constante}finkitxmlcodelatexdvp kitxmlcodelatexdvpa\ \mathrm{constante}finkitxmlcodelatexdvpOn dira que kitxmlcodeinlinelatexdvpx_0finkitxmlcodeinlinelatexdvp, la position initiale (quand l'objet a commencé son mouvement), est la condition initiale du système.
III-A-1. Un exemple▲
Un train avance à une vitesse de kitxmlcodeinlinelatexdvp90\ {}^{km}/_{h}finkitxmlcodeinlinelatexdvp dans une gare. Dans cinq secondes, à quelle distance de la gare sera-t-il ?
Il est facile de décrypter cet énoncé : la vitesse vaut kitxmlcodeinlinelatexdvp90\ {}^{km}/_{h}finkitxmlcodeinlinelatexdvp, soit kitxmlcodeinlinelatexdvp25\ {}^{m}/_{s}finkitxmlcodeinlinelatexdvp (Google vous donnera la réponse instantanément : la calculatrice Google). Si vous préférez faire la conversion à la main, écrivez le rapport dans ses unités actuelles et reportez-vous au système MKSA :
kitxmlcodelatexdvp\frac{90\ km}{1\ h} = \frac{90\,000\ m}{3600\ s} = 25\ {}^{m}/_{s}finkitxmlcodelatexdvpOn considère le point d'origine comme étant la gare, l'origine de notre repère.
kitxmlcodelatexdvpx_0 = 0=finkitxmlcodelatexdvp
On nous demande de calculer la distance après cinq secondes. La fonction qui donne la distance en fonction du temps est  , utilisons-la :
, utilisons-la :
Le train a donc parcouru 125 mètres en l'espace de 5 secondes à la vitesse de kitxmlcodeinlinelatexdvp90\ {}^{km}/_{h}finkitxmlcodeinlinelatexdvp.
III-B. Mouvement rectiligne uniformément accéléré (MRUA)▲
Un mobile soumis à un mouvement rectiligne uniformément accéléré voit sa vitesse varier linéairement au cours du temps et, par conséquent, son déplacement s'exprime par une fonction du second degré décrivant une parabole.
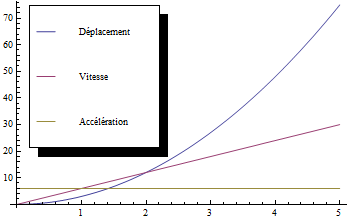
<< PlotLegends`
Plot[{3 x^2, 6 x, 6}, {x, 0, 5}, PlotLegend -> {"Déplacement", "Vitesse", "Accélération"}]En équations, cela donne :
kitxmlcodelatexdvpx(t) = x_0 + v_0 \times t + \frac{1}{2} \times a \times t^2finkitxmlcodelatexdvp kitxmlcodelatexdvpv(t) = v_0 + a \times tfinkitxmlcodelatexdvp kitxmlcodelatexdvpa\ \mathrm{constante}finkitxmlcodelatexdvpOn dira que le couple kitxmlcodeinlinelatexdvp(x_0 ; v_0)finkitxmlcodeinlinelatexdvp constitue les conditions initiales du système.
III-B-1. Un exemple▲
Reprenons notre train mais dans des conditions plus réalistes. Au lieu d'être déjà accéléré, il doit démarrer dans la gare (le précédent ne faisait que la traverser, celui-ci s'est arrêté et doit redémarrer). Son accélération est de kitxmlcodeinlinelatexdvp25\ {}^{m}/_{s^2}finkitxmlcodeinlinelatexdvp. À quelle distance de la gare sera-t-il après cinq secondes ? Quelle sera sa vitesse à ce moment précis ?
Reprenons tout ce qui a déjà été fait dans l'exemple précédent, puisque les conditions sont semblables.
L'accélération vaut kitxmlcodeinlinelatexdvp25\ {}^{m}/_{s}finkitxmlcodeinlinelatexdvp ; le train redémarre et a donc une vitesse nulle au début. Il commence ce mouvement au repos à l'origine du repère. Nous avons donc :
kitxmlcodelatexdvpv(5) = 0 + 25 \times 5 = 125\ {}^{m}/_{s}finkitxmlcodelatexdvp kitxmlcodelatexdvpx(5) = 0 + 0 \times 5 + \frac{1}{2} \times 25 \times 5^2 = 312,5\ mfinkitxmlcodelatexdvpIII-C. Récapitulatif▲
| MRU | MRUA | |
|---|---|---|
| Déplacement | Linéaire | Parabolique |
| Vitesse | Constante | Linéaire |
| Accélération | Nulle | Constante |
Vous remarquerez que, en descendant d'une ligne, vous obtenez des polynômes d'un degré inférieur. En effet, la vitesse instantanée est définie comme la dérivée du déplacement en fonction du temps, voici l'explication. Dans l'autre sens, le déplacement est la primitive de la vitesse. Si le mobile considéré accélère selon une fonction bien plus compliquée qu'une constante, il vous suffira de le primitiver une fois pour obtenir sa vitesse ; une deuxième fois pour obtenir sa position :
kitxmlcodelatexdvpa(t) = v'(t) = x''(t)finkitxmlcodelatexdvp kitxmlcodelatexdvp\int \! a(t) \, \mathrm{d}t + v_0 = v(t)finkitxmlcodelatexdvp kitxmlcodelatexdvp\int \! v(t) \, \mathrm{d}t + x_0 = x(t)finkitxmlcodelatexdvp
En cinématique, une autre notation est souvent utilisée pour désigner les dérivées par rapport au temps, le point suscrit :
kitxmlcodeinlinelatexdvpv = \dot{x} = \frac{\mathrm{d}x}{\mathrm{d}t}finkitxmlcodeinlinelatexdvp
kitxmlcodeinlinelatexdvpa = \dot{v} = \ddot{x} = \frac{\mathrm{d}v}{\mathrm{d}t} = \frac{\mathrm{d}^2x}{\mathrm{d}t^2}finkitxmlcodeinlinelatexdvp
Ce genre de notations se lit « x pointé » ou « x point » et se rencontre principalement en cinématique et en dynamique,
là où les dérivées par rapport au temps occupent une belle place.
IV. Conclusion▲
La cinématique est la partie la plus simple de la mécanique physique. Elle ne permet de traiter en l'état que des mouvements monodimensionnels (le train ne pouvait se mouvoir qu'en ligne droite, en avant ou en arrière) ; cette théorie n'aurait pas pu décrire les forces qui s'appliquent au train dans un tournant, cette théorie ne parle d'ailleurs jamais de force : elle se limite à décrire les mouvements des objets. Le train avance. Comment se fait-il qu'il avance ? Pour répondre à ce genre de questions, il faut introduire la notion de force, qui ne sera développée qu'en dynamique.
La prochaine étape est la combinaison de mouvements cinématiques : par exemple, un nageur veut traverser une rivière avec un certain courant. Il s'agit là de cinématique pluridimensionnelle.
Merci à mon chat pour avoir appuyé sur les touches de ce clavier, permettant à cet article d'exister, ainsi qu'à vinc-mai et ericd69 pour leurs remarques et à jacques_jean pour sa relecture orthographique !