





I. Introduction▲
On a vu tous les types de mouvements à une dimension principaux : le MRU (mouvement rectiligne uniforme) et le MRUA (mouvement rectiligne uniformément accéléré). On peut encore parler des mouvements circulaires. Ici, on étudiera toujours de la cinématique, c'est-à-dire que l'on décrira des objets qui se meuvent, sans jamais dire pourquoi ils entrent en mouvement (on verra plus tard qu'une force cause le passage d'un état de repos à un état de MRU et inversément).
On fera un usage bien plus poussé des vecteurs dans cette partie, la direction ne se change pas simplement en trois dimensions en changeant le signe de la vitesse dans une équation ! Cette vitesse peut évoluer dans les trois directions de l'espace, on la représentera donc par un vecteur. On en profitera donc pour faire un bref rappel sur la notion de vecteur et de repère orthonormé (cartésien ou polaire, ce dernier sera très utile pour généraliser les mouvements circulaires - dans un repère polaire, un mouvement circulaire a la même équation que le mouvement linéaire correspondant, en faisant correspondre les notions développées).
On considérera le lecteur déjà familier d'un certain nombre de notions déjà abordées précédemment en cinématique. Notamment, la lecture de l'article suivant est considérée comme prérequis.
II. Vecteurs▲
Un vecteur est tout à fait indépendant de toute représentation que l'on peut s'en faire. Cependant, l'objectif étant de lui donner des composantes chiffrées, on devra travailler avec un repère, permettant alors de lui accorder des composantes sans mal.
II-A. Repère▲
Qu'est-ce qu'un repère ?
Un référentiel sert de référence pour la position d'une particule et ses dérivées successives (vitesse et accélération). En toute généralité, on choisira un repère
fixe - par exemple, le coin de la table pour origine et ses côtés comme axes des abscisses et des ordonnées. Il peut être choisi arbitrairement, il suffit de l'expliciter.
Le mouvement étant représenté par un vecteur, il est entièrement indépendant de tout repère. Cependant, pour modéliser ce mouvement, il est nécessaire de passer
à des données chiffrées qui, elles, nécessitent un repère.
On peut choisir un repère non fixe. Cependant, s'il est accéléré, il faudra tenir compte de certains paramètres supplémentaires pour modéliser correctement la réalité, on parlera alors de forces de Coriolis ou forces fictives. Tant que faire se peut, autant se simplifier la tâche et choisir un repère bien fixe.
Deux techniques coexistent pour définir un repère à deux dimensions : la première fait intervenir des coordonnées cartésiennes, c'est le type de repère le plus courant, avec deux axes perpendiculaires ; la seconde n'utilise qu'un seul axe couplé à un angle, il s'agit alors de coordonnées polaires.
Un point dans un repère cartésien bénéficie d'une abscisse (kitxmlcodeinlinelatexdvpxfinkitxmlcodeinlinelatexdvp) et d'une ordonnée (kitxmlcodeinlinelatexdvpyfinkitxmlcodeinlinelatexdvp), correspondant aux distances par rapport à l'origine sur chacun des axes, ces coordonnées peuvent être négatives ou positives selon la position du point. Ce genre de repère se généralise extrêmement facilement à des espaces de dimension n, trois par exemple. Il suffit d'ajouter alors un troisième axe, l'axe des cotes, pour ajouter la profondeur. Les axes sont des droites, que l'on choisit généralement orthonormée - c'est-à-dire qu'elles sont perpendiculaires les unes aux autres et possèdent la même unité. On peut aussi choisir des courbes comme axes, formant alors un repère curviligne. Il s'agit cependant là de curiosités mathématiques pour lesquelles on ne trouvera pas d'utilité à court terme dans ces tutoriels.
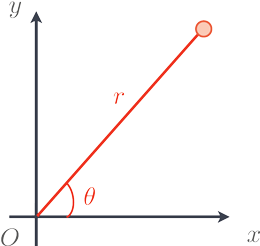
Un point dans un repère polaire est identifié par une distance (kitxmlcodeinlinelatexdvprfinkitxmlcodeinlinelatexdvp) et un angle (kitxmlcodeinlinelatexdvp\thetafinkitxmlcodeinlinelatexdvp). La distance est reportée sur la droite formant l'angle à l'origine avec l'axe polaire, donnant ainsi le point. Deux méthodes coexistent pour généraliser ces repères dans l'espace à trois dimensions : les coordonnées cylindriques (ajoutant un deuxième axe, la hauteur) et sphériques (utilisant un autre angle). On s'épanchera sur ce sujet lorsque cela sera nécessaire.
Évidemment, un point reste semblable à lui-même, que l'on soit dans un repère cartésien ou polaire. Il existe donc une méthode relativement simple pour passer de l'un à l'autre.
Des coordonnées polaires aux coordonnées cartésiennes :
kitxmlcodelatexdvpx = r \cos \thetafinkitxmlcodelatexdvp kitxmlcodelatexdvpy = r \sin \thetafinkitxmlcodelatexdvpDes coordonnées cartésiennes aux coordonnées polaires :
kitxmlcodelatexdvpr = \sqrt{x^2 + y^2}finkitxmlcodelatexdvp kitxmlcodelatexdvp\tan{\theta} = \frac{y}{x}finkitxmlcodelatexdvpElles découlent directement du théorème de Pythagore et des relations dans les triangles rectangles (voir à ce sujet la FAQ sur la trigonométrie).
Seule la tangente de l'angle est donnée : un peu de trigonométrie supplémentaire est donc nécessaire. En résumé, cela donne ce résultat, un peu long mais sans besoin supplémentaire (1) :
kitxmlcodelatexdvp\theta = \begin{cases}\arctan\left(\frac{y}{x}\right) & \mbox{ si } x > 0 \mbox{ et } y \ge 0\\\arctan\left(\frac{y}{x}\right) + 2\pi & \mbox{ si } x > 0 \mbox{ et } y < 0\\\arctan\left(\frac{y}{x}\right) + \pi & \mbox{ si } x < 0\\\frac{\pi}{2} & \mbox{ si } x = 0 \mbox{ et } y > 0\\\frac{3\pi}{2} & \mbox{ si } x = 0 \mbox{ et } y < 0\end{cases}finkitxmlcodelatexdvpII-B. Vecteur▲
Certains diront qu'un vecteur est une flèche, ce qui est tout sauf exact. Un vecteur se représente par un flèche, généralement, dans le plan. La notion de vecteur, cependant, transcende complètement le plan ou l'espace. Un vecteur n'accepte comme définition généraliste que « élément d'un espace vectoriel », ce qui n'est généralement pas d'un grand secours. On n'aura pas besoin de ce niveau d'abstraction, on se limitera à son interprétation géométrique. Dans ce cas, un vecteur représente la translation d'un point A vers un point B. Il se représente alors sur le dessin comme étant la ligne rejoignant les points A et B, la flèche pointant vers son extrémité, B. Ce vecteur ne se limitera pas à la conception des points A et B, cette flèche n'en est qu'une matérialisation comme tant d'autres. Prenez tout point du plan et appliquez-lui la transformation définie par ce vecteur, voici un autre représentant de ce vecteur. On travaillera habituellement dans un système d'axes cartésien.
Un vecteur peut donc se noter par ses coordonnées, le déplacement effectué sur chacun des axes, qu'il s'agisse d'un vecteur à une, deux ou trois dimensions. Chaque axe pouvant être représenté par un vecteur unitaire (de norme 1), les coordonnées peuvent s'expliciter en tant que coefficients multiplicateurs d'une combinaison linéaire de ces vecteurs unitaires. Dernière représentation usuelle, la matrice colonne des composantes (rarement, une matrice ligne est utilisée). La norme d'un vecteur est la distance séparant l'origine de l'extrémité d'un représentant de ce vecteur.
kitxmlcodelatexdvp\overrightarrow{AB} = (x, y) = x \times \widehat{e_x} + y \times \widehat{e_y}finkitxmlcodelatexdvp kitxmlcodelatexdvp\left|\left|\overrightarrow{AB}\right|\right| = \sqrt{x^2 + y^2}finkitxmlcodelatexdvpLes relations qui existent entre deux vecteurs existent également entre deux coordonnées : si un vecteur est la somme de plusieurs autres vecteurs, alors ses composantes seront la somme des composantes des autres vecteurs ; un multiple d'un vecteur aura des composantes multiples ; deux vecteurs égaux auront les mêmes composantes
kitxmlcodelatexdvp\vec{a} = (x_a, y_a, z_a)finkitxmlcodelatexdvp kitxmlcodelatexdvp\vec{b} = (x_b, y_b, z_b)finkitxmlcodelatexdvp kitxmlcodelatexdvp\vec{c} = (x_c, y_c, z_c)finkitxmlcodelatexdvp kitxmlcodelatexdvp\vec{d} = \vec{a} + \vec{b} + \vec{c}finkitxmlcodelatexdvp kitxmlcodelatexdvp\vec{a} = \vec{b} \Longleftrightarrow \begin{cases} x_a = x_b \\ y_a = y_b \\ z_a = z_b \end{cases}finkitxmlcodelatexdvp kitxmlcodelatexdvp\vec{d} = (x_a + x_b + x_c, y_a + y_b + y_c, z_a + z_b + z_c)finkitxmlcodelatexdvp kitxmlcodelatexdvp\eta \vec{a} = (\eta x_a, \eta y_a, \eta z_a)finkitxmlcodelatexdvpOn définit également deux produits : le produit scalaire, dans le plan et l'espace, et le produit vectoriel. Le produit scalaire donne pour résultat un réel et peut se calculer de deux manières différentes, ce qui peut par exemple être utilisé pour évaluer l'angle formé par deux vecteurs. Il se note par un point en l'air : kitxmlcodeinlinelatexdvp\cdotfinkitxmlcodeinlinelatexdvp.
kitxmlcodelatexdvp\vec{a} \cdot \vec{b} = ||\vec{a}|| \times ||\vec{b}|| \times \cos{\theta}finkitxmlcodelatexdvp kitxmlcodelatexdvp\vec{a} \cdot \vec{b} = x_a \times x_b + y_a \times y_bfinkitxmlcodelatexdvpLe produit vectoriel n'est pas défini dans le plan. En effet, il résulte en un vecteur perpendiculaire aux deux vecteurs dont il est le produit, ce qui ne peut exister que dans l'espace. Il se note par un accent circonflexe : kitxmlcodeinlinelatexdvp\wedgefinkitxmlcodeinlinelatexdvp.
kitxmlcodelatexdvp\vec{a} \wedge \vec{b} = \vec{c}finkitxmlcodelatexdvp kitxmlcodelatexdvp\vec{c} = \begin{vmatrix} \widehat{e_x} & \widehat{e_y} & \widehat{e_z} \\ x_a & y_a & z_a \\ x_b & y_b & z_b\end{vmatrix} = \begin{pmatrix} y_a z_b - z_a y_b \\ z_a x_b - x_a z_b \\ x_a y_b - y_a x_b\end{pmatrix}finkitxmlcodelatexdvpIl existe une formule permettant de calculer la norme de ce vecteur sans devoir effectuer cet assez long calcul :
kitxmlcodelatexdvp\left|\left|\vec{c}\right|\right| = \left|\left|\vec{a}\right|\right \times \left|\left|\vec{b}\right|\right \times \sin{\theta}finkitxmlcodelatexdvpOn remarquera facilement la similitude avec le produit scalaire : la fonction trigonométrique n'est plus le cosinus mais bien le sinus, différence importante.
Ces rappels ou découvertes faits, on peut passons au vif du sujet, la cinématique appliquée à plusieurs dimensions.
III. Cinématique à plusieurs dimensions▲
Tout d'abord, je tiens à vous décevoir fortement : non, l'adjonction d'une infinité de dimensions ne changera rien aux formules déjà existances, aux principes de base déjà acquis ! Quand la cinématique s'est investie des espaces à plusieurs dimensions, elle n'a jamais fait que réutiliser l'existant. Un objet qui se meut dans plusieurs directions sera statique, en MRU ou en MRUA selon cette direction. De ce principe découle tout le reste. L'article pourrait se finir ici, la messe est dite ; il va cependant continuer pour montrer la voie analytique, les méthodes plus pratiques à appliquer sur ce genre de problèmes. Tout d'abord, on généralise les notions connues dans une dimension sous forme de scalaires en vecteurs à plusieurs dimensions.
III-A. Généralisation de la position, de la vitesse et de l'accélération▲
La position à une seule dimension se limite à la différence entre deux scalaires. Le précédent article montrait des vecteurs, les calculs n'auraient pas été changés en utilisant de simples vecteurs. Ici, il est impossible de n'utiliser que des scalaires, il faut passer à la logique vectorielle pour garder un problème simple. On garde donc la même expression vectorielle :
kitxmlcodelatexdvp\mathbf{d} = \overrightarrow{OP_2} - \overrightarrow{OP_1}finkitxmlcodelatexdvpLa vitesse reste la dérivée de la position, l'accélération reste la dérivée de la vitesse, cela ne changera jamais en cinématique. Pour la vitesse moyenne et l'accélération moyenne, on n'utilise plus simplement la différence de position scalaire mais la norme de la différence vectorielle. Et c'est tout. Les notions ayant été introduites en termes vectoriels dès le début, cela ne choquera pas beaucoup.
Tout est maintenant dit. Il suffit de dire que l'objet parcourt un MRU ou un MRUA avec certaines caractéristiques selon un axe, tel autre mouvement sur un autre. On aura ainsi les positions sur chacun des axes en fonction du temps. Maintenant, on travaille un peu avec ceci à l'aide d'une mise en situation.
III-B. Mise en situation▲
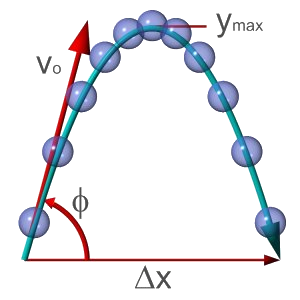
On cherche donc à décrire un tir parabolique : un objet est lancé depuis l'origine avec un certain angle, on veut savoir quel angle permettra à l'objet d'atteindre la hauteur la plus grande et lequel le fera aller au plus loin.
Afin de simplifier les calculs et de ne pas sortir du cadre de cet article, considérons la résistance de l'air nulle, l'absence de vent et la gravitation constante. La seule accélération subie par le projectile est donc la gravité.
kitxmlcodelatexdvp\vec{a} = (x, y) = (0, g)finkitxmlcodelatexdvpLes conditions initiales sont une vitesse non nulle (on lance l'objet d'un certain angle, donc pas uniquement selon un seul des deux axes considérés) et une position nulle (il est lancé depuis l'origine).
kitxmlcodelatexdvp\vec{r}(0) = \mathbf{r_i} = (0, 0)finkitxmlcodelatexdvp kitxmlcodelatexdvp\vec{v}(0) = \mathbf{v_i} = (v_{xi}, v_{yi})finkitxmlcodelatexdvpLa vitesse initiale est un vecteur selon les deux composantes. Il est possible d'exploiter ce phénomène pour exprimer la vitesse selon chaque axe en fonction de l'angle de lancer.
kitxmlcodelatexdvp\begin{cases} v_{xi} = v_i \times \cos{\phi} \\ v_{yi} = v_i \times \sin{\phi} \end{cases}finkitxmlcodelatexdvpCette information acquise, on peut exprimer le MRU selon l'axe des abscisses - la vitesse est donnée au lancer et n'est plus modifiée par après - et le MRUA selon l'axe des ordonnées - une certaine vitesse est imprimée au lancer et subit l'effet de la gravité.
kitxmlcodelatexdvp\begin{cases} x(t) = v_i \times \cos{\phi} \times t \\ y(t) = v_i \times \sin{\phi} \times t - \frac{1}{2} \times g \times t^2 \end{cases}finkitxmlcodelatexdvpCe n'est pas parce que ces deux équations sont liées par une accolade qu'elles sont dépendantes ! Elles peuvent très bien régir ces deux mouvements sans qu'ils aient lieu en même temps. Cependant, cela pose un problème de morale à certains auteurs que de les écrire séparées, cela reviendrait à dire qu'il est physiquement possible que l'objet se meuve d'abord selon l'axe des abscisses puis selon l'axe des ordonnées, alors qu'il se meut sur les deux en même temps.
Après quelque chipotage algébrique tentant d'éliminer autant que possible le temps de ces pauvres équations, on a :
kitxmlcodelatexdvpy(t) = \tan{\phi} \times x(t) - \frac{g}{2 \times v_i^2 \times cos^2{\phi}} \times x^2(t)finkitxmlcodelatexdvp kitxmlcodelatexdvpy(t) = \tan{\phi} \times x(t) - \frac{g}{2 \times v_i^2} \times \left(tan^2{\phi} + 1\right) \times x^2(t)finkitxmlcodelatexdvpLes deux racines de cette expression sont le lancer et son atterissage. L'égalant à 0, on obtient deux racines : seule la seconde nous intéresse.
kitxmlcodelatexdvpR = x(t) = \frac{v_i^2}{g} \times \sin{2\phi}finkitxmlcodelatexdvp kitxmlcodelatexdvp\phi = \frac{\pi}{4}finkitxmlcodelatexdvpLa hauteur, quant à elle, est maximale quand l'expression atteint un maximum, quand la vitesse verticale est devenue nulle, passant du positif (montée) au négatif (chute). Il suffit donc de trouver la racine de la dérivée.
kitxmlcodelatexdvph = \frac{v_1^2}{2g} \times sin^2{\phi}finkitxmlcodelatexdvp kitxmlcodelatexdvp\phi = \frac{\pi}{2}finkitxmlcodelatexdvpIV. Conclusion▲
Comme on a pu le voir, en travaillant avec des vecteurs dès le début, passer d'une à plusieurs dimensions en cinématique n'est pas très dur. Il ne reste que très peu de choses à faire en cinématique pure : les mouvements circulaires. Cependant, ils seront abordés plus tard, en dynamique. Là, les mouvements auront une cause : elle sera nommée « force ». Cela permet d'être plus précis dans la description de la réalité.
Merci à AuraHxC pour ses conseils lors de la rédaction ainsi qu'à jpcheck pour sa relecture orthographique !