





I. Introduction▲
La théorie expliquée ici (la mécanique classique) a été développée par Sir Isaac Newton, dans ses Philosophiæ Naturalis Principia Mathematica, (disponible en latin sur Google Books).
On considérera le lecteur déjà familier d'un certain nombre de notions déjà abordées précédemment en cinématique. Notamment, la lecture des articles suivants est considérée comme prérequis.
I-A. Vis impressa est actio in corpus exercita, ad mutandum eius statum uel quiescendi uel mouendi in directum▲
Tout se base sur le concept de force :
Une force est l'action par laquelle l'état du corps est changé, soit que cet état est le repos ou le mouvement uniforme en ligne droite.
Si un corps se met à avancer, c'est qu'il a été sous l'action d'une force ; si un corps accélère, c'est qu'il est sous l'action d'une force ; si un corps n'avance pas en ligne droite, c'est qu'il est sous l'action d'une force.
La force est une grandeur vectorielle : elle s'applique à un objet dans une certaine direction avec un sens et une intensité donnée. Cela permet de représenter simplement plusieurs forces qui s'appliquent sur un même objet : il suffit de faire la somme vectorielle des forces qui s'y appliquent pour obtenir la force nette (ou résultante).
Si la force résultante est nulle, l'objet ne subit pas d'accélération et persiste donc dans son état de mouvement rectiligne uniforme ou de repos. Si l'objet ne subit pas d'accélération, ce n'est pas pour autant qu'il n'est sous l'action d'aucune force, cela signifie simplement que la force résultante est nulle.
L'unité de la force est le netwon (symbole : kitxmlcodeinlinelatexdvpNfinkitxmlcodeinlinelatexdvp), une définition sera donnée dans peu de temps.
I-B. Les types de force▲
- les forces de contact (frottement, poussée, etc.) ;
- les champs de force (gravité, champ magnétique, etc.).
- la gravitation (interactions entre deux corps) ;
- l'électromagnétisme (mettant en œuvre l'électricité et le magnétisme) ;
- l'interaction nucléaire faible (radioactivité) ;
- l'interaction nucléaire forte (assure la cohésion des atomes).
La physique, à l'heure actuelle, considère que, à chacune de ces interactions, est associée une particule qui la transporte : le graviton pour la gravitation (toujours hypothétique), le photon pour l'électromagnétisme, les gluons pour l'interaction nucléaire forte et les bosons lourds pour l'interaction nucléaire faible. Il est intéressant de noter que le concept de force ne semble pas entièrement aphysique, mais bien véhiculé par des particules.
Les interactions nucléaires sortent totalement de l'objet de ce cours ; l'électromagnétisme nécessite plus de connaissances en mécanique que ce qui est actuellement disponible ici.
II. Les trois lois de Newton▲
II-A. Corpus omne perseverare in statu suo quiescendi uel mouendi uniformiter in directum, nisi quatenus a uiribus impressis cogitur statum illum mutare▲
Si le corps n'est soumis à aucune force (ce n'est donc pas valable en cas de force nette nulle uniquement), on peut définir un référentiel d'inertie, dans lequel le corps a une accélération nulle. Un référentiel d'inertie est aussi appelé un référentiel inertiel ou galiléen. Newton définissait de tels référentiels de la sorte :
Si un objet n'interagit pas avec d'autres objets, il est possible d'identifier un référentiel dans lequel l'objet a une accélération nulle.
En d'autres termes, un référentiel est galiléen si dans ce référentiel tout corps libre est animé d'un MRU ou est immobile. Cependant, un référentiel n'est pas constitué que d'un repère de l'espace, il comporte également un repère de temps. Les effets relativistes étant plus que négligeables à cette échelle, on considère un temps absolu. (1)(2)
En pratique, il n'est pas aisé de trouver un repère utile pour la résolution du problème et inertiel : la Terre tourne en permanence, par exemple. En fonction des besoins, on peut considérer un référentiel terrestre suffisamment précis ou non.
II-B. Mutationem motus proportionalem esse ui motrici impressae et fieri secundum lineam rectam qua uis illa imprimitur▲
Les changements dans le mouvement sont proportionnels à la force motrice et se font en ligne droite dans laquelle la force a été imprimée.
On peut exprimer cela mathématiquement avec une égalité : d'un côté, la cause (la somme des forces) ; de l'autre, le résultat (une accélération, pondérée par la masse inertielle).
kitxmlcodelatexdvp\mathbf{F} = m \times \mathbf{a}finkitxmlcodelatexdvpCette équation est aussi appelée principe fondamental de la dynamique en translation (aussi, loi fondamentale, seconde loi du mouvement de Newton, équation différentielle de Newton ou autre, en fonction du contexte et des habitudes).
Il s'agit également d'une équation différentielle du second ordre vectorielle. Si on note kitxmlcodeinlinelatexdvp\mathbf{s}\left(t\right)finkitxmlcodeinlinelatexdvp le vecteur position du point matériel en fonction du temps, alors on aura l'équation kitxmlcodeinlinelatexdvp\mathbf{F} = m \ddot{\mathbf{s}}\left(t\right)finkitxmlcodeinlinelatexdvp (l'accélération étant la double dérivée temporelle de la position). Cette manière de considérer l'équation est à la base de la mécanique rationnelle, qui vise à imposer un raisonnement très mathématique pour la résolution des problèmes de mécanique.
II-B-1. Unité de la force▲
On peut ainsi définir l'unité de la force, sachant que la masse s'exprime en kilogrammes (kitxmlcodeinlinelatexdvpkgfinkitxmlcodeinlinelatexdvp) et l'accélération en mètres par seconde au carré (kitxmlcodeinlinelatexdvp{}^{m}/_{s^2}finkitxmlcodeinlinelatexdvp) :
kitxmlcodelatexdvp1 N = 1 {}^{kg \times m}/_{s^2}finkitxmlcodelatexdvpII-B-2. Remarques▲
On l'appelle aussi la loi fondamentale de la dynamique, car cette simple équation permet de résoudre bon nombre de problèmes posés.
Cette loi est vectorielle : on peut l'appliquer sur chaque axe.
Cependant, elle n'est valide que dans le cas de référentiels d'inertie - ou galiléens - (sinon, il faut tenir compte de forces fictives) et pour des vitesses faibles par rapport à celle de la lumière (le cas général ; cependant, pour des cas plus spécifiques, la théorie de la dynamique newtonienne n'est plus d'application, les erreurs étant trop grandes, il faut passer à la relativité restreinte).
II-B-3. Poids et masse▲
La Terre exerce une force sur tout corps dans son rayon d'action (infini en théorie, mais avec une décroissance proportionnelle à l'inverse du carré de la distance, soit en pratique « assez vite » négligeable), la force d'attraction gravitationnelle (3), proportionnelle à la masse (la quantité de matière du corps) :
kitxmlcodelatexdvp\mathbf{P} = m \times \mathbf{g}finkitxmlcodelatexdvpCette force est dirigée vers le centre de la Terre. Son intensité s'appelle le poids :
kitxmlcodelatexdvpP = m \times gfinkitxmlcodelatexdvpkitxmlcodeinlinelatexdvp\mathbf{g}finkitxmlcodeinlinelatexdvp est une constante qui exprime la force avec laquelle la Terre attire les corps, elle varie en fonction du corps qui attire (le rapport des masses entre le corps attracteur et le corps attiré influe énormément).
II-C. Actioni contrariam semper et aequalem esse reactionem: siue corporum duorum actiones in se mutuo semper esse aequales et in partes contrarias dirigi▲
L'action est toujours contraire et égale à la réaction : les actions de deux corps l'un sur l'autre sont toujours égales et dirigées dans des directions contraires.
Tout corps kitxmlcodeinlinelatexdvpAfinkitxmlcodeinlinelatexdvp exerçant une force sur un corps kitxmlcodeinlinelatexdvpBfinkitxmlcodeinlinelatexdvp subit une force de même intensité mais de sens opposé exercée par le corps kitxmlcodeinlinelatexdvpAfinkitxmlcodeinlinelatexdvp. En des termes plus vectoriels, en notant que les forces s'exercent sur des corps différents :
kitxmlcodelatexdvp\mathbf{F}_{1 \to 2} = - \mathbf{F}_{2 \to 1}finkitxmlcodelatexdvpOn notera cependant plus fréquemment la force qu'un premier corps exerce sur un second comme ceci, conventionnellement :
kitxmlcodelatexdvp\mathbf{F}_{12} = - \mathbf{F}_{21}finkitxmlcodelatexdvpIII. L'exemple du chariot▲
III-A. Les trois lois de Newton▲
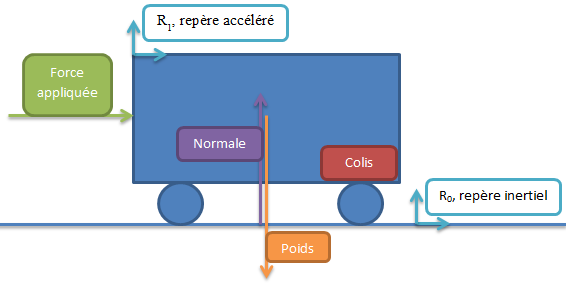
On se place dans un référentiel terrestre, que l'on peut considérer comme galiléen (il s'agit en réalité d'une excellente approximation d'un référentiel galiléen, l'erreur est suffisamment minuscule pour être négligeable sans plus de considérations, comme très souvent en physique classique). On considère un chariot qui avance grâce à une force.

On suppose évidemment que les roues sont parfaitement graissées et entraînent une résistance négligeable, ainsi qu'elles frottent très peu contre le sol (frottements que l'on néglige également). On a également ajouté une force normale, la réaction du sol contre le chariot, qui exprime le fait que le chariot ne peut pas s'enfoncer dans le sol. Cette force (ou réaction) normale sera expliquée plus en détail dans un article suivant.
La cinématique permet d'extraire un graphique de la vitesse suite à l'impression d'un mouvement :
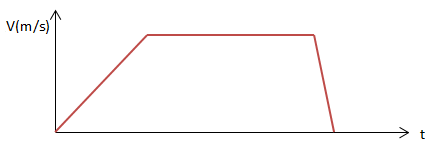
On peut donc en déduire la force en fonction du temps, grâce à la deuxième loi de Newton :

On reconnaît sans peine trois phases : une accélération (MRUA), un mouvement libre (4) (MRU), puis une décélération (MRUA d'accélération négative).
La dynamique donne une explication à la première phase : on exerce une force sur le chariot, celui-ci subit alors une accélération, en vertu de la deuxième loi de Newton. Ce qui donne l'équation suivante, en ne considérant que l'axe horizontal (sur l'axe vertical, on n'a que le poids et sa réciproque, qui n'agissent pas du tout ici) :
kitxmlcodelatexdvp\mathbf{F} = m \times \mathbf{a}finkitxmlcodelatexdvpEnsuite, le corps n'est soumis à aucune autre force que son propre poids, ainsi qu'à la réaction exercée par le sol (par application de la deuxième loi de Newton en projection sur l'axe vertical du repère de l'espace du référentiel galiléen) : en utilisant la première loi, on en convient qu'il ne peut que rester dans son état de MRU ou de repos. Étant donné qu'il est en mouvement quand la résultante des forces devient nulle, il ne peut être qu'en MRU à ce moment.
Vient la troisième et dernière phase : une force extérieure s'oppose au mouvement du chariot, le force à freiner (on peut imaginer quelqu'un qui tient la corde et retient le chariot). Cette force reste constante en intensité, car l'accélération négative est constante.
III-B. Un référentiel d'inertie▲
Si on se place dans le chariot lors de sa décélération, ce référentiel (kitxmlcodeinlinelatexdvpR_1finkitxmlcodeinlinelatexdvp) ne pourra pas être qualifié d'« inertiel », car le chariot est lui-même en accélération (le repère kitxmlcodeinlinelatexdvpR_1finkitxmlcodeinlinelatexdvp sera en accélération par rapport à un repère terrestre, donc inertiel dans le cas du mouvement considéré, kitxmlcodeinlinelatexdvpR_0finkitxmlcodeinlinelatexdvp). En effet, lors d'un freinage brutal, la première loi de Newton ne sera pas vérifiée dans le premier repère : dans ce repère, le colis est a priori au repos et aucune force extérieure supplémentaire ne s'ajoute au colis, il devrait donc rester au repos. Cependant, lors du freinage, un observateur extérieur le voit commencer à bouger.
Intuitivement, la vision depuis le repère non inertiel du chariot est fausse. Pour coller à la réalité, on se voit donc obligé d'introduire des forces « fictives » dans ce repère accéléré, justement pour tenir compte du fait qu'il est accéléré. Ainsi, les deux repères donnent la même description du monde et elle correspond parfaitement à ce qu'on aurait attendu : à l'extérieur, la première loi de Newton a été respectée, puisque rien n'a retenu le colis en mouvement lorsque le chariot s'est arrêté, il s'est donc retrouvé de l'autre côté du chariot ; à l'intérieur, une force s'est appliquée sur le colis, le forçant à se mouvoir.
Dans ce cas, il n'y a qu'un corps en translation, on ne considérera donc que des forces d'entraînement (dans des cas en rotation, on doit tenir compte des forces de Coriolis). Cet artifice permettra d'utiliser exactement les mêmes lois vectorielles que précédemment, à un terme d'entraînement près. On remarquera que cette force est bien fictive car aucune réaction ne peut lui être associée.
Dans le référentiel terrestre kitxmlcodeinlinelatexdvpR_0finkitxmlcodeinlinelatexdvp, on peut écrire, pour le colis isolé :
kitxmlcodelatexdvpm \times \mathbf{a}_{\mathrm{corps},\ R_0} = \mathbf{F}_{ext}finkitxmlcodelatexdvpOn tente maintenant de se ramener au repère en accélération, suivant le schéma :
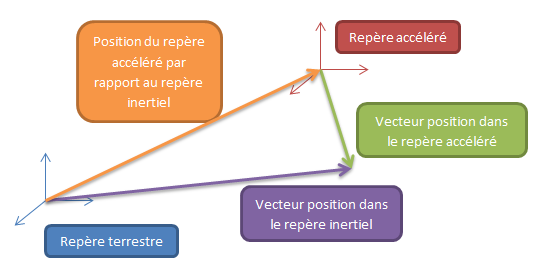
On a, en dérivant successivement :
kitxmlcodelatexdvp\mathbf{s}_{\mathrm{Corps},\ R_0} = \mathbf{s}_{\mathrm{corps},\ R_1} + \mathbf{s}_{R_1,\ R_0}finkitxmlcodelatexdvp kitxmlcodelatexdvp\mathbf{v}_{\mathrm{Corps},\ R_0} = \mathbf{v}_{\mathrm{corps},\ R_1} + \mathbf{v}_{R_1,\ R_0}finkitxmlcodelatexdvp kitxmlcodelatexdvp\mathbf{a}_{\mathrm{Corps},\ R_0} = \mathbf{a}_{\mathrm{corps},\ R_1} + \mathbf{a}_{R_1,\ R_0}finkitxmlcodelatexdvpOn peut donc remplacer dans l'équation du mouvement précédente pour obtenir successivement :
kitxmlcodelatexdvpm \times \mathbf{a}_{\mathrm{corps},\ R_0} = \mathbf{F}_{ext}finkitxmlcodelatexdvp kitxmlcodelatexdvpm \times \left(\mathbf{a}_{\mathrm{corps},\ R_1} + \mathbf{a}_{R_1,\ R_0}\right) = \mathbf{F}_{ext}finkitxmlcodelatexdvp kitxmlcodelatexdvpm \times \mathbf{a}_{\mathrm{corps},\ R_1} + m \times \mathbf{a}_{R_1,\ R_0} = \mathbf{F}_{ext}finkitxmlcodelatexdvpFinalement, on obtient le résultat définitif suivant :
kitxmlcodelatexdvpm \times \mathbf{a}_{\mathrm{corps},\ R_1} = \mathbf{F}_{ext} - m \times \mathbf{a}_{R_1,\ R_0}finkitxmlcodelatexdvp kitxmlcodelatexdvpm \times \mathbf{a}_{\mathrm{corps},\ R_1} = \mathbf{F}_{ext} + \mathbf{F}_ifinkitxmlcodelatexdvpCe dernier terme, kitxmlcodeinlinelatexdvp\mathbf{F}_ifinkitxmlcodeinlinelatexdvp, dans l'expression de la loi fondamentale de la dynamique dans le repère kitxmlcodeinlinelatexdvpR_1finkitxmlcodeinlinelatexdvp, est une force fictive : une force apparente qui ne provient pas d'une interaction physique mais de l'accélération de kitxmlcodeinlinelatexdvpR_1finkitxmlcodeinlinelatexdvp. On doit en tenir compte pour que l'équilibre des forces soit possible. On peut l'interpréter physiquement comme une force d'inertie. Elle est due à l'accélération d'entraînement.
En cas de freinage brutal, on aura
kitxmlcodelatexdvpa_{R_1,\ R_0} < 0finkitxmlcodelatexdvpdonc
kitxmlcodelatexdvpF_i = - m \times a_{R_1,\ R_0} > 0finkitxmlcodelatexdvpet cette force d'inertie va propulser le colis vers l'avant du chariot :
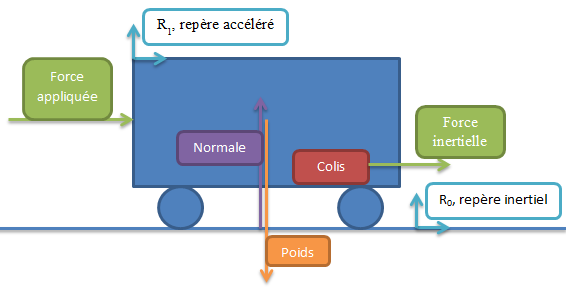
C'est le même phénomène qui a rendu les ceintures de sécurité obligatoires dans une grande majorité des pays.
IV. Conclusions▲
Les forces permettent d'expliquer les causes des mouvements. Par contre, cette description n'est toujours pas à même d'expliquer les rotations (on utilisera la notion de moment de force), on se limite ici à la description des corps en translation rectiligne. Ensuite, on pourra passer à une quantification toute différente : l'énergie. On pourra expliquer ce qui fait que les montagnes russes n'ont pas toujours besoin de moteurs dans les montées. On pourra aussi envisager des outils mathématiques plus puissants que ceux utilisés ici, notamment les torseurs, une clé de la résolution de problèmes basés sur des solides rigides.
Merci à fearyourself pour ses encouragements lors de la rédaction de cet article ! Merci à f-leb pour son aide, très précieuse, d'une précision chirurgicale et sur le long terme ! Merci à hornetbzz pour ses remarques ! Merci à Claude Leloup pour sa relecture orthographique !